AI-Based Grasping and Oriented Placement of ‘Unseen’ Objects
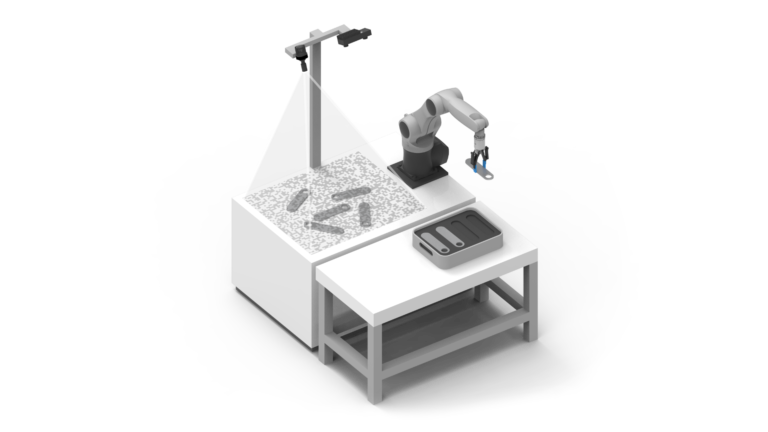
The rc_reason ItemPickAI software enables the efficient separation and oriented placement of so-called ‘unseen’ objects – i.e. objects that the system has not explicitly learned by teaching models or seen in training data beforehand.
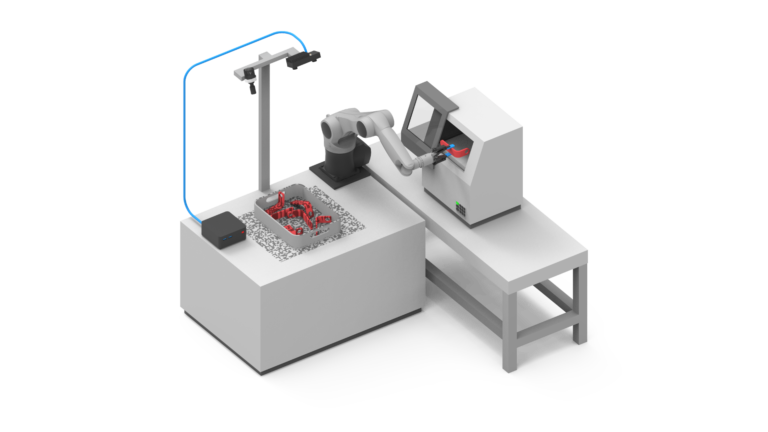
This AI-based solution for robotic pick-and-place applications with suction grippers calculates aligned grasp poses for a suction gripper on unknown, deformable objects of a certain category. These objects can come in chaotic boxes or load carriers, and both mixed and unmixed configurations are possible.
During commissioning, only the object category (e.g. ‘bag’) and the size of the gripper’s suction cup need to be selected. These parameters can be flexibly adapted to new conditions at any time. This means that pick-and-place applications such as picking and (de)palletizing can be implemented efficiently within a very short time frame, even without expert knowledge in the field of AI or image processing.
The rc_reason ItemPickAI module runs offboard with any 3D sensor via Roboception’s rc_cube and is configured and read out via the standard interface. ItemPickAI calculates a configurable number of grasp poses for a suction device on all identified objects within a predefined workspace.





{kind=link}