Reliable CAD-based Detection without Onsite Image Acquisition
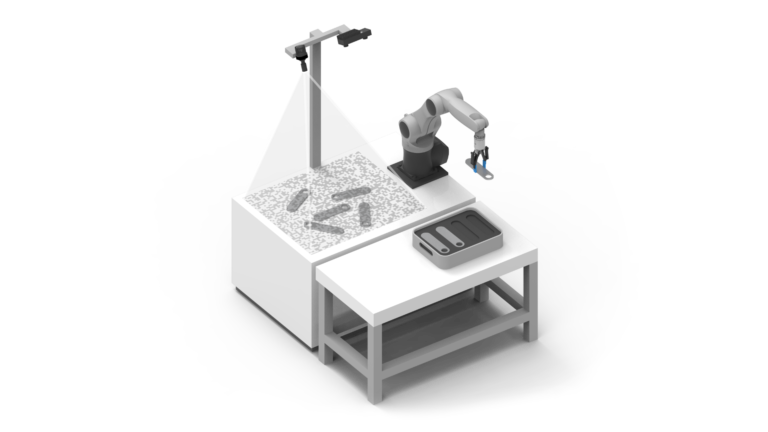
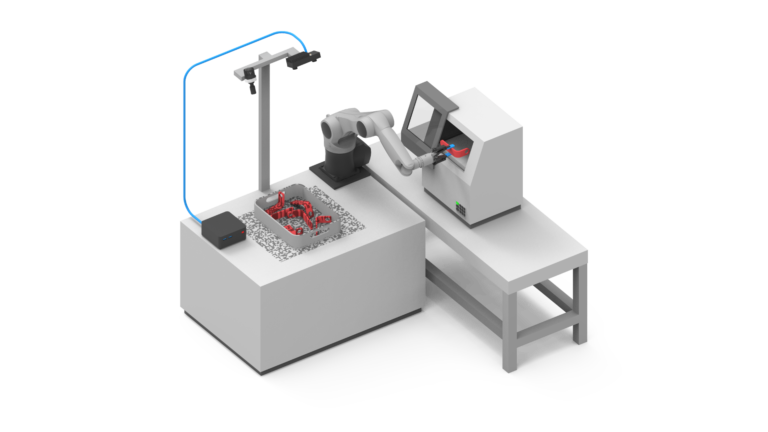
The rc_reason CADMatch machine tending software module uses a CAD model as input, AppliedAI-based machine learning techniques for ensuring reliable detection, and highly intuitive user interfaces for ultimate usability. The module enables a robotic system to reliably detect, locate and pick objects from unmixed load carriers, completely independent of the object‘s position and orientation.
The user can easily configure the grasp points on any trained object through the WebGUI and add additional information about the load carrier and gripper for a complete visualization of the point cloud and potential collisions.
This software solution can significantly increase the efficiency of production processes, for example by automating machine tending, kitting processes or assembly operations.
• Detection and localization of objects based on CAD data
• Provides grasp point(s) for reliable pick-and-place tasks
• Template creation provided as a service
• Improves the efficiency of automation processes






{kind=link}